Steuerung nach DIN 19237
In der DIN 19237 werden unterschieldiche Arten derr Programmierung durch verbindungsprogrammierte und speicherprogrammierte Steuerungen festgelegt.
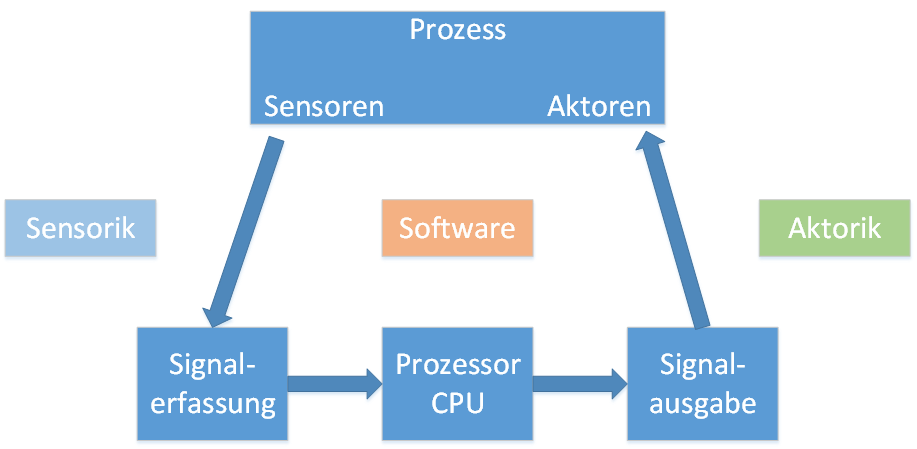
Alle Steuerungen bestehen aus drei grundlegenden Elementen:
- Signalbildung (-> Erfassung von Prozeßzuständen: Eingangsteil)
- Signalverarbeitung (-> Verarbeitung von Prozeßzustandsdaten)
- Signalausgabe 8 (-> Beeinflussung des Prozesses aufgrund der Verarbeitungsergebnisse)
Unterscheidung von Steuerungen nach Signaldarstellung:
- analoge Steuerungen
- binäre Steuerungen
- digitale Steuerungen
Bei analogen Steuerungen werden analoge Signale durch in Reihe geschaltete Funktionsglieder verarbeitet. Klassisches Beispiel ist eine Elektroheizung, bei der eine Kurvenscheibe die Spannung stufenlos verändert.
In binären Steuerungen werden binäre Signale verarbeitet, die als einzelne Signale oder als Gruppe von Binärsignalen digitale Informationen übermitteln und nicht Bestandteil zahlenmäßig dargestellter Informationen sind. Klassisches Beispiel für eine binäre Steuerung ist eine Treppenlichtschaltung, bei der nach dem Einschalten, die Lampen leuchten und nach fest definierter Zeit automatisch abgeschaltet werden.
Digitale Steuerungen sind dann sinnvoll, wenn Funktionen wie Zählen, Vergleichen oder Rechenoperationen notwendig sind. Beispielsweise wird eine Pumpe bei Erreichen eines festgelegten Füllstand abgeschaltet.
Unterscheidung von Steuerungen nach Signalverarbeitung
- synchrone / asynchrone Steuerungen
- Verknüpfungssteuerungen
- Ablaufsteuerungen
Bei einer synchronen Steuerung erfolgt die Auswertung der Signale und die Ausgabe der verarbeiteten Signale zeitgleich (synchron) zum einem Taktsignal. Klassisches Beispiel für synchrone Steuerungen sind Steuerungen, welche von Mikroprozessoren ausgeführt werden. Das Programm wird fragt jede Sekunde das Eingangssignal eines Temperaturfühlers ab und verarbeitet diese.
Bei einer asynchronen Steuerung erfolgt die Bearbeitung nicht nach einem Taktsignal. Signaländerungen werden durch Änderungen der Eingangssignale ausgelöst. Veränderungen der Eingangssignale führen unmittelbar zu Veränderungen der Ausgangssignale. Beispiele für eine asynchrone Steuerung sind Relaissteuerungen und elektronische Steuerungen, welche nicht von Mikroprozessoren ausgeführt werden.
Verknüpfungssteuerungen, sind Steuerungen bei denen Eingangssignale zu jedem Zeitpunkt ein eindeutiger Zustand der der Ausgangssignale zugeordnet wird. Die Zuordnung erfolgt durch Anwendung von boolschen Verknüpfungen. Während eines Bearbeitungszyklus werden alle logischen Verknüpfungen abgearbeitet. Beispiele für Verknüpfungssteuerungen sind SPS-Anwendungen. Bedingungen werden permanent überprüft.
Ablaufsteuerungen (oder auch Schrittkette genannt) besitzen grundlegend das Merkmal, dass der Steuerungsablauf Schritt für Schritt erfolgt. Der Teilschritt B kann nur dann gestartet werden, wenn zuvor Schritt A mit allen Nebenbedingungen erfüllt wurde. Weiterschaltbedingungen können sowohl Zeit-, als auch Prozessgesteuert sein. Ein einfaches Beispiel ist der Ablauf Grün-Gelb-Rot-Phase einer Ampel.
Unterscheidung von Steuerungen nach Programmumsetzung
– Verbindungsprogrammierte Steuerung (VPS)
– Speicherprogrammierte Steuerung (SPS)
Verbindungsprogrammierte Steuerungen (VPS) werden aus Schaltelementen wzB. Relais- und Schützsteuerungen oder auch aus Halbleitersteuerungen mit Logikbausteinen aufgebaut. Die Verbindung der Funktionselemente erfolgt durch Drähte, Bahnen auf Leiterplatten oder steckbare Drahtverbindungen. Grundlegend für die VPS ist, dass die Schaltlogik durch die feste Verbindung der Bauelemente erfolgt.
Vorteile:
- keine speziellen Programmierkenntnisse erforderlich
- Änderungen ohne Programmiergerät möglich
Nachteile:
- nachträgliche Änderungen sind mit äußerst hohem Aufwand verbunden
- hoher Aufwand der Planung
- Bauteile teilweise sehr Verschleißanfällig
- hoher Platzbedarf
Speicherprogrammierbare Steuerungen (SPS) sind Mikrocomputersteuerungen, welche speziell für steuerungstechnische Anwendungen in der Industrie entwickelt wurden. Die Programmierung erfolgt grundlegend auf Basis von boolscher Logik. Im Laufe der Entwicklung erweiterte sich der Funktionsumfang von binären Verknüpfungen zu allen höheren Operationen der Mathematik, wortverarbeitende Arithmetik, Programmverzweigungen oder Unterprogrammtechniken. Der logische Ablauf folgt dem EVA – Prinzip von Eingabe, Verarbeitung und Ausgabe. Speicherprogrammierbare Steuerungen werden in zwei Typen, abhängig von ihrem Speicherverhalten unterteilt.
Freiprogrammierbare Steuerungen besitzen Schreib-Lese-Speicher (RAM, EEPROM), deren Speicherinhalt geändert werden kann, ohne dass die Speichereinheit ausgebaut werden muss.
Austauschprogrammierbare Steuerungen besitzen einen Lese-Speicher (ROM,PROM,EPROM). Der Speicherinhalt der Lese-Speicher kann nur durch Ausbau bzw. Austausch des Datenträgers geändert werden.
Vorteile:
- langlebig und verschleißfrei
- Änderungen sind mit geringem Aufwand möglich
- geeignet für komplexe Aufgaben
- geringer Platzbedarf
- schnelle Fehlererkennung
- vernetzbar mit weiterer IT-Infrastruktur, Wartung zum Teil über das Internet möglich
- Programme können mit geringem Aufwand erstellt und vervielfältigt werden
- einheitliche Standards und die Kommentarfunktion ermöglicht einen schnellen Einstieg in komplexe Systeme
Nachteile:
- es können nur Signalfolgen bis 50 Hz erfasst werden
- hoch qualifiziertes Personal notwendig
- als elektronische Steuerung weniger störsicher wie eine Schützsteuerung
- bei einfachen Anlagen unwirtschaftlich